Poses
On peut mettre le robot dans une position définie en utilisant une boite pose.
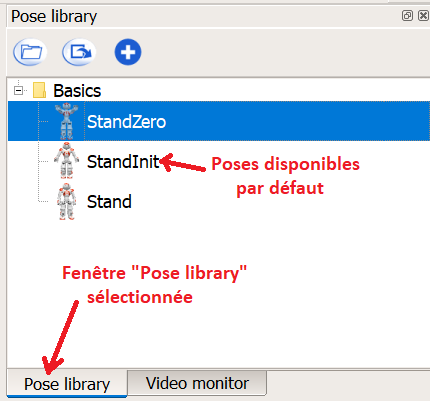
Si vous cliquez sur l'une d'elles, le robot virtuel ou réel prendra cette position immédiatement.
On pourra créer et enregistrer ses propres poses dans cette bibliothèque.